
基于結(jié)構(gòu)光測(cè)量技術(shù)和3D物體識(shí)別技術(shù)開(kāi)發(fā)的機(jī)器人3D視覺(jué)引導(dǎo)系統(tǒng)
發(fā)布時(shí)間:2023-09-01 | 信息來(lái)源:上海硯拓自動(dòng)化科技有限公司 | 點(diǎn)擊量:976
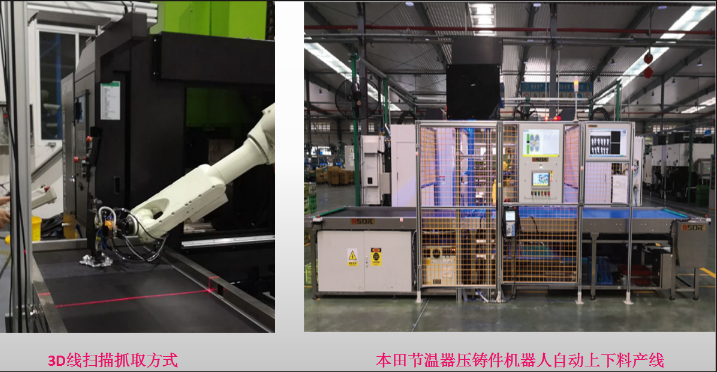
基于結(jié)構(gòu)光測(cè)量技術(shù)和3D物體識(shí)別技術(shù)開(kāi)發(fā)的機(jī)器人3D視覺(jué)引導(dǎo)系統(tǒng),可對(duì)較大測(cè)量深度范圍內(nèi)散亂堆放的零件進(jìn)行全自由的定位和拾取。相比傳統(tǒng)的2D視覺(jué)定位方式只能對(duì)固定深度零件進(jìn)行識(shí)別且只能獲取零件的部分自由度的位置信息,具有更高的應(yīng)用柔性和更大的檢測(cè)范圍。可為機(jī)床上下料、零件分揀、碼垛堆疊等工業(yè)問(wèn)題提供有效的自動(dòng)化解決方案。
項(xiàng)目簡(jiǎn)介:
人工將產(chǎn)品隨意擺放到上料線(左線),人工擺滿(mǎn)后離開(kāi),預(yù)計(jì)1h后再過(guò)來(lái)擺放產(chǎn)品,收加工完成的產(chǎn)品;視覺(jué)負(fù)責(zé)拍照定位,機(jī)器人抓取負(fù)責(zé)放入OP10,OP20不同工序加工中心加工、取料、清洗。
